Выражение вида называется линейной комбинацией векторов A 1 , A 2 ,...,A n с коэффициентами λ 1, λ 2 ,...,λ n .
Определение линейной зависимости системы векторов
Система векторов A 1 , A 2 ,...,A n называется линейно зависимой , если существует ненулевой набор чисел λ 1, λ 2 ,...,λ n , при котором линейная комбинация векторов λ 1 *A 1 +λ 2 *A 2 +...+λ n *A n равна нулевому вектору , то есть система уравнений: имеет ненулевое решение.
Набор чисел λ 1, λ 2 ,...,λ n является ненулевым, если хотя бы одно из чисел λ 1, λ 2 ,...,λ n отлично от нуля.
Определение линейной независимости системы векторов
Пример 29.1Система векторов A 1 , A 2 ,...,A n называется линейно независимой , если линейная комбинация этих векторов λ 1 *A 1 +λ 2 *A 2 +...+λ n *A n равна нулевому вектору только при нулевом наборе чисел λ 1, λ 2 ,...,λ n , то есть система уравнений: A 1 x 1 +A 2 x 2 +...+A n x n =Θ имеет единственное нулевое решение.
Проверить, является ли линейно зависимой система векторов
Решение :

1. Составляем систему уравнений :
2. Решаем ее методом Гаусса . Преобразования Жордано системы приведены в таблице 29.1. При расчете правые части системы не записываются так как они равны нулю и при преобразованиях Жордана не изменяются.

3. Из последних трех строк таблицы записываем разрешенную систему, равносильную исходной системе:
![]()
4. Получаем общее решение системы :
5. Задав по своему усмотрению значение свободной переменной x 3 =1, получаем частное ненулевое решение X=(-3,2,1).
Ответ: Таким образом, при ненулевом наборе чисел (-3,2,1) линейная комбинация векторов равняется нулевому вектору -3A 1 +2A 2 +1A 3 =Θ. Следовательно, система векторов линейно зависимая .
Свойства систем векторов
Свойство (1)
Если система векторов линейно зависимая, то хотя бы один из векторов разлагается по остальным и, наоборот, если хотя бы один из векторов системы разлагается по остальным, то система векторов линейно зависимая.
Свойство (2)
Если какая-либо подсистема векторов линейно зависимая, то и вся система линейно зависимая.
Свойство (3)
Если система векторов линейно независимая, то любая ее подсистема линейно независимая.
Свойство (4)
Любая система векторов, содержащая нулевой вектор, линейно зависимая.
Свойство (5)
Система m-мерных векторов всегда является линейно зависимой, если число векторов n больше их размерности (n>m)
Базис системы векторов
Базисом системы векторов A 1 , A 2 ,..., A n называется такая подсистема B 1 , B 2 ,...,B r (каждый из векторов B 1 ,B 2 ,...,B r является одним из векторов A 1 , A 2 ,..., A n) , которая удовлетворяет следующим условиям:
1. B 1 ,B 2 ,...,B r линейно независимая система векторов;
2. любой вектор A j системы A 1 , A 2 ,..., A n линейно выражается через векторы B 1 ,B 2 ,...,B rr — число векторов входящих в базис.
Теорема 29.1 О единичном базисе системы векторов.Если система m-мерных векторов содержит m различных единичных векторов E 1 E 2 ,..., E m , то они образуют базис системы.
Алгоритм нахождения базиса системы векторов
Для того, чтобы найти базис системы векторов A 1 ,A 2 ,...,A n необходимо:
- Составить соответствующую системе векторов однородную систему уравнений A 1 x 1 +A 2 x 2 +...+A n x n =Θ
- Привести эту систему
Линейная зависимость и независимость векторов
Определения линейно зависимой и независимой систем векторов
Определение 22
Пусть имеем систему из n-векторов
и имеем набор чисел
 ,
тогда
,
тогда
(11)
называется линейной комбинацией данной системы векторов с данным набором коэффициентов.
Определение 23
Система векторов
 называется линейно зависимой,
если существует такой набор коэффициентов
называется линейно зависимой,
если существует такой набор коэффициентов
 ,
из которых хотя бы один не равен нулю,
что линейная комбинация данной системы
векторов с этим набором коэффициентов
равна нулевому вектору:
,
из которых хотя бы один не равен нулю,
что линейная комбинация данной системы
векторов с этим набором коэффициентов
равна нулевому вектору:
Пусть
 ,
тогда
,
тогда

Определение 24 (через представление одного вектора системы в виде линейной комбинации остальных)
Система векторов
 называется линейно зависимой,
если хотя бы один из векторов этой
системы можно представить в виде линейной
комбинации остальных векторов этой
системы.
называется линейно зависимой,
если хотя бы один из векторов этой
системы можно представить в виде линейной
комбинации остальных векторов этой
системы.
Утверждение 3
Определения 23 и 24 эквивалентны.
Определение 25 (через нулевую линейную комбинацию)
Система векторов
 называется линейно
независимой, если нулевая линейная
комбинация этой системы возможна лишь
при всех
называется линейно
независимой, если нулевая линейная
комбинация этой системы возможна лишь
при всех
 равных нулю.
равных нулю.
Определение 26 (через невозможность представления одного вектора системы в виде линейной комбинации остальных)
Система векторов
 называется линейно
независимой, если не один из векторов
этой системы нельзя представить в виде
линейной комбинации других векторов
этой системы.
называется линейно
независимой, если не один из векторов
этой системы нельзя представить в виде
линейной комбинации других векторов
этой системы.
Свойства линейно зависимой и независимой систем векторов
Теорема 2 (нулевой вектор в системе векторов)
Если в системе векторов имеется нулевой вектор, то система линейно зависима.
Пусть
 ,
тогда
.
,
тогда
.
Получим
 ,
следовательно, по определению линейно
зависимой системы векторов через нулевую
линейную комбинацию (12)
система
линейно зависима.
,
следовательно, по определению линейно
зависимой системы векторов через нулевую
линейную комбинацию (12)
система
линейно зависима.
Теорема 3 (зависимая подсистема в системе векторов)
Если в системе векторов имеется линейно зависимая подсистема, то и вся система линейно зависима.
Пусть
 - линейно зависимая подсистема
- линейно зависимая подсистема
 ,
среди которых хотя бы одно не равно
нулю:
,
среди которых хотя бы одно не равно
нулю:
Значит, по определению 23, система линейно зависима.
Теорема 4
Любая подсистема линейно независимой системы линейно независима.
От противного. Пусть система линейно независима и в ней имеется линейно зависимая подсистема. Но тогда по теореме 3 вся система будет также линейно зависимой. Противоречие. Следовательно, подсистема линейно независимой системы не может быть линейно зависимой.
Геометрический смысл линейной зависимости и независимости системы векторов
Теорема 5
Два вектора
 и
и
 линейно зависимы тогда и только тогда,
когда
линейно зависимы тогда и только тогда,
когда
 .
.
Необходимость.
 и
и
 - линейно зависимы
- линейно зависимы
 ,
что выполняется условие
,
что выполняется условие
 .
Тогда
.
Тогда
 ,
т.е.
,
т.е.
 .
.
Достаточность.
Линейно зависимы.
Следствие 5.1
Нулевой вектор коллинеарен любому вектору
Следствие 5.2
Для того чтобы два вектора были линейно
независимы необходимо и достаточно,
чтобы
 был не коллинеарен
был не коллинеарен
 .
.
Теорема 6
Для того чтобы система из трёх векторов была линейно зависима необходимо и достаточно, чтобы эти векторы были компланарными.
Необходимость.
 - линейно зависимы, следовательно, один
вектор можно представить в виде линейной
комбинации двух других.
- линейно зависимы, следовательно, один
вектор можно представить в виде линейной
комбинации двух других.
 ,
(13)
,
(13)
где
 и
и
 .
По правилу параллелограмма
.
По правилу параллелограмма
 есть диагональ параллелограмма со
сторонами
есть диагональ параллелограмма со
сторонами
 ,
но параллелограмм – плоская фигура
,
но параллелограмм – плоская фигура
 компланарны
компланарны
 - тоже компланарны.
- тоже компланарны.
Достаточность .
 - компланарны. Приложим три вектора к
точке О:
- компланарны. Приложим три вектора к
точке О:


 C
C
 B`
B`

 – линейно зависимы
– линейно зависимы
Следствие 6.1
Нулевой вектор компланарен любой паре векторов.
Следствие 6.2
Для того чтобы векторы
 были линейно независимы необходимо и
достаточно, чтобы они были не компланарны.
были линейно независимы необходимо и
достаточно, чтобы они были не компланарны.
Следствие 6.3
Любой вектор плоскости можно представить в виде линейной комбинации любых двух неколлинеарных векторов этой же плоскости.
Теорема 7
Любые четыре вектора в пространстве линейно зависимы.
Рассмотрим 4 случая:
Проведем плоскость через векторы , затем плоскость через векторы и плоскость через векторы . Затем проведем плоскости, проходящие через точку D, параллельные парам векторов ; ; соответственно. По линиям пересечения плоскостей строим параллелепипед OB 1 D 1 C 1 ABDC .

Рассмотрим OB
1
D
1
C
1
– параллелограмм по построению по
правилу параллелограмма
 .
.
Рассмотрим OADD 1 –
параллелограмм (из свойства параллелепипеда)
 , тогда
, тогда
EMBED Equation.3 .
По теореме 1
 такие, что
.
Тогда
такие, что
.
Тогда
 ,
и по определению 24 система векторов
линейно
зависимая.
,
и по определению 24 система векторов
линейно
зависимая.
Следствие 7.1
Суммой трёх некомпланарных векторов в пространстве является вектор, совпадающий с диагональю параллелепипеда, построенного на этих трёх векторах, приложенных к общему началу, причём начало вектора суммы совпадает с общим началом этих трёх векторов.
Следствие 7.2
Если в пространстве взять 3 некомпланарных вектора, то любой вектор этого пространства можно разложить в линейную комбинацию данных трёх векторов.
Задача 1. Выяснить, является ли система векторов линейно независимой. Систему векторов будем задавать матрицей системы, столбцы которой состоят из координат векторов.
 .
.
Решение.
Пусть линейная комбинация  равна нулю. Записав это равенство в координатах, получим следующую систему уравнений:
равна нулю. Записав это равенство в координатах, получим следующую систему уравнений:
 .
.
Такая система уравнений называется треугольной. Она имеет единственное решение  . Следовательно, векторы
. Следовательно, векторы  линейно независимы.
линейно независимы.
Задача 2. Выяснить, является ли линейно независимой система векторов.
 .
.
Решение.
Векторы  линейно независимы (см. задачу 1). Докажем, что вектор является линейной комбинацией векторов
линейно независимы (см. задачу 1). Докажем, что вектор является линейной комбинацией векторов  . Коэффициенты разложения по векторам
. Коэффициенты разложения по векторам  определяются из системы уравнений
определяются из системы уравнений
 .
.
Эта система, как треугольная, имеет единственное решение.
Следовательно, система векторов  линейно зависима.
линейно зависима.
Замечание . Матрицы, такого вида, как в задаче 1, называются треугольными , а в задаче 2 – ступенчато-треугольными . Вопрос о линейной зависимости системы векторов легко решается, если матрица, составленная из координат этих векторов, является ступенчато треугольной. Если матрица не имеет специального вида, то с помощью элементарных преобразований строк , сохраняющих линейные соотношения между столбцами, её можно привести к ступенчато-треугольному виду.
Элементарными преобразованиями строк матрицы(ЭПС) называются следующие операции над матрицей:
1) перестановка строк;
2) умножение строки на отличное от нуля число;
3) прибавление к строке другой строки, умноженной на произвольное число.
Задача 3. Найти максимальную линейно независимую подсистему и вычислить ранг системы векторов
 .
.
Решение. Приведем матрицу системы с помощью ЭПС к ступенчато-треугольному виду. Чтобы объяснить порядок действий, строчку с номером преобразуемой матрицы обозначим символом . В столбце после стрелки указаны действия над строками преобразуемой матрицы, которые надо выполнить для получения строк новой матрицы.

 .
.
Очевидно, что первые два столбца полученной матрицы линейно независимы, третий столбец является их линейной комбинацией, а четвертый не зависит от двух первых. Векторы  называются базисными. Они образуют максимальную линейно независимую подсистему системы , а ранг системы равен трем.
называются базисными. Они образуют максимальную линейно независимую подсистему системы , а ранг системы равен трем.
Базис, координаты
Задача 4.
Найти базис и координаты векторов в этом базисе на множестве геометрических векторов, координаты которых удовлетворяют условию  .
.
Решение . Множество является плоскостью, проходящей через начало координат. Произвольный базис на плоскости состоит из двух неколлинеарных векторов. Координаты векторов в выбранном базисе определяются решением соответствующей системы линейных уравнений.
Существует и другой способ решения этой задачи, когда найти базис можно по координатам.
Координаты  пространства не являются координатами на плоскости , так как они связаны соотношением
пространства не являются координатами на плоскости , так как они связаны соотношением  , то есть не являются независимыми. Независимые переменные и (они называются свободными) однозначно определяют вектор на плоскости и, следовательно, они могут быть выбраны координатами в . Тогда базис
, то есть не являются независимыми. Независимые переменные и (они называются свободными) однозначно определяют вектор на плоскости и, следовательно, они могут быть выбраны координатами в . Тогда базис  состоит из векторов, лежащих в и соответствующих наборам свободных переменных
состоит из векторов, лежащих в и соответствующих наборам свободных переменных  и
и  , то есть .
, то есть .
Задача 5. Найти базис и координаты векторов в этом базисе на множестве всех векторов пространства , у которых нечетные координаты равны между собой.
Решение . Выберем, как и в предыдущей задаче, координаты в пространстве .
Так как  , то свободные переменные
, то свободные переменные  однозначно определяют вектор из и, следовательно, являются координатами. Соответствующий базис состоит из векторов .
однозначно определяют вектор из и, следовательно, являются координатами. Соответствующий базис состоит из векторов .
Задача 6.
Найти базис и координаты векторов в этом базисе на множестве всех матриц вида  , где
, где  – произвольные числа.
– произвольные числа.
Решение . Каждая матрица из однозначно представима в виде:
Это соотношение является разложением вектора из по базису  с координатами
с координатами  .
.
Задача 7. Найти размерность и базис линейной оболочки системы векторов
 .
.
Решение. Преобразуем с помощью ЭПС матрицу из координат векторов системы к ступенчато-треугольному виду.


 .
.
Столбцы  последней матрицы линейно независимы, а столбцы
последней матрицы линейно независимы, а столбцы  линейно выражаются через них. Следовательно, векторы
линейно выражаются через них. Следовательно, векторы  образуют базис
образуют базис  , и
, и  .
.
Замечание
. Базис в выбирается неоднозначно. Например, векторы  также образуют базис
также образуют базис  .
.
Введенные нами линейные операции над векторами дают возможность составлять различные выражения для векторных величин и преобразовывать их при помощи установленных для этих операций свойств.
Исходя из заданного набора векторов а 1 , ..., а n , можно составить выражение вида
где а 1 , ..., а n - произвольные действительные числа. Это выражение называют линейной комбинацией векторов а 1 , ..., а n . Числа α i , i = 1, n , представляют собой коэффициенты линейной комбинации . Набор векторов называют еще системой векторов .
В связи с введенным понятием линейной комбинации векторов возникает задача описания множества векторов, которые могут быть записаны в виде линейной комбинации данной системы векторов а 1 , ..., а n . Кроме того, закономерны вопросы об условиях, при которых существует представление вектора в виде линейной комбинации, и о единственности такого представления.
Определение 2.1. Векторы а 1 , ..., а n называют линейно зависимыми , если существует такой набор коэффициентов α 1 , ... , α n , что
α 1 a 1 + ... + α n а n = 0 (2.2)
и при этом хотя бы один из этих коэффициентов ненулевой. Если указанного набора коэффициентов не существует, то векторы называют линейно независимыми .
Если α 1 = ... = α n = 0, то, очевидно, α 1 а 1 + ... + α n а n = 0. Имея это в виду, можем сказать так: векторы а 1 , ..., а n линейно независимы, если из равенства (2.2) вытекает, что все коэффициенты α 1 , ... , α n равны нулю.
Следующая теорема поясняет, почему новое понятие названо термином "зависимость" (или "независимость"), и дает простой критерий линейной зависимости.
Теорема 2.1. Для того чтобы векторы а 1 , ..., а n , n > 1, были линейно зависимы, необходимо и достаточно, чтобы один из них являлся линейной комбинацией остальных.
◄ Необходимость. Предположим, что векторы а 1 , ..., а n линейно зависимы. Согласно определению 2.1 линейной зависимости, в равенстве (2.2) слева есть хотя бы один ненулевой коэффициент, например α 1 . Оставив первое слагаемое в левой части равенства, перенесем остальные в правую часть, меняя, как обычно, у них знаки. Разделив полученное равенство на α 1 , получим
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
т.е. представление вектора a 1 в виде линейной комбинации остальных векторов а 2 , ..., а n .
Достаточность. Пусть, например, первый вектор а 1 можно представить в виде линейной комбинации остальных векторов: а 1 = β 2 а 2 + ... + β n а n . Перенеся все слагаемые из правой части в левую, получим а 1 - β 2 а 2 - ... - β n а n = 0, т.е. линейную комбинацию векторов а 1 , ..., а n с коэффициентами α 1 = 1, α 2 = - β 2 , ..., α n = - β n , равную нулевому вектору. В этой линейной комбинации не все коэффициенты равны нулю. Согласно определению 2.1, векторы а 1 , ..., а n линейно зависимы.
Определение и критерий линейной зависимости сформулированы так, что подразумевают наличие двух или более векторов. Однако можно также говорить о линейной зависимости одного вектора. Чтобы реализовать такую возможность, нужно вместо "векторы линейно зависимы" говорить "система векторов линейно зависима". Нетрудно убедиться, что выражение "система из одного вектора линейно зависима" означает, что этот единственный вектор является нулевым (в линейной комбинации имеется только один коэффициент, и он не должен равняться нулю).
Понятие линейной зависимости имеет простую геометрическую интерпретацию. Эту ин-терпретацию проясняют следующие три утверждения.
Теорема 2.2. Два вектора линейно зависимы тогда и только тогда, когда они коллинеарны.
◄ Если векторы а и b линейно зависимы, то один из них, например а, выражается через другой, т.е. а = λb для некоторого действительного числа λ. Согласно определению 1.7 произведения вектора на число, векторы а и b являются коллинеарными.
Пусть теперь векторы а и b коллинеарны. Если они оба нулевые, то очевидно, что они линейно зависимы, так как любая их линейная комбинация равна нулевому вектору. Пусть один из этих векторов не равен 0, например вектор b. Обозначим через λ отношение длин векторов: λ = |а|/|b|. Коллинеарные векторы могут быть однонаправленными или противоположно направленными . В последнем случае у λ изменим знак. Тогда, проверяя определение 1.7, убеждаемся, что а = λb. Согласно теореме 2.1, векторы а и b линейно зависимы.
Замечание 2.1. В случае двух векторов, учитывая критерий линейной зависимости, доказанную теорему можно переформулировать так: два вектора коллинеарны тогда и только тогда, когда один из них представляется как произведение другого на число. Это является удобным критерием коллинеарности двух векторов.
Теорема 2.3. Три вектора линейно зависимы тогда и только тогда, когда они компланарны .
◄ Если три вектора а, Ь, с линейно зависимы, то, согласно теореме 2.1, один из них, например а, является линейной комбинацией остальных: а = βb + γс. Совместим начала векторов b и с в точке A. Тогда векторы βb, γс будут иметь общее начало в точке A и по правилу параллелограмма их сумма, т.е. вектор а, будет представлять собой вектор с началом A и концом , являющимся вершиной параллелограмма, построенного на векторах-слагаемых. Таким образом, все векторы лежат в одной плоскости, т. е. компланарны.
Пусть векторы а, b, с компланарны. Если один из этих векторов является нулевым, то очевидно, что он будет линейной комбинацией остальных. Достаточно все коэффициенты линейной комбинации взять равными нулю. Поэтому можно считать, что все три вектора не являются нулевыми. Совместим начала этих векторов в общей точке O. Пусть их концами будут соот-ветственно точки A, B, C (рис. 2.1). Через точку C проведем прямые, параллельные прямым, проходящим через пары точек O, A и O, B. Обозначив точки пересечения через A" и B", получим параллелограмм OA"CB", следовательно, OC" = OA" + OB" . Вектор OA" и ненулевой вектор а= OA коллинеарны, а потому первый из них может быть получен умножением второго на действительное число α:OA" = αOA . Аналогично OB" = βOB , β ∈ R. В результате получаем,что OC" = α OA + βOB , т.е. вектор с является линейной комбинацией векторов а и b. Согласно теореме 2.1, векторы a, b, с являются линейно зависимыми.

Теорема 2.4. Любые четыре вектора линейно зависимы.
◄ Доказательство проводим по той же схеме, что и в теореме 2.3. Рассмотрим произвольные четыре вектора a, b, с и d. Если один из четырех векторов является нулевым, либо среди них есть два коллинеарных вектора, либо три из четырех векторов компланарны, то эти четыре вектора линейно зависимы. Например, если векторы а и b коллинеарны, то мы можем составить их линейную комбинацию αa + βb = 0 с ненулевыми коэффициентами, а затем в эту комбинацию добавить оставшиеся два вектора, взяв в качестве коэффициентов нули. Получим равную 0 линейную комбинацию четырех векторов, в которой есть ненулевые коэффициенты.
Таким образом, мы можем считать, что среди выбранных четырех векторов нет нулевых, никакие два не коллинеарны и никакие три не являются компланарными. Выберем в качестве их общего начала точку О. Тогда концами векторов a, b, с, d будут некоторые точки A, B, С, D (рис. 2.2). Через точку D проведем три плоскости, параллельные плоскостям ОВС, OCA, OAB, и пусть A", B", С" - точки пересечения этих плоскостей с прямыми OA, OB, ОС соответственно. Мы получаем параллелепипед OA"C"B"C"B"DA", и векторы a, b, с лежат на его ребрах, выходящих из вершины О. Так как четырехугольник OC"DC" является параллелограммом, то OD = OC" + OC" . В свою очередь, отрезок ОС" является диагональю параллелограмма OA"C"B", так что OC" = OA" + OB" , а OD = OA" + OB" + OC" .
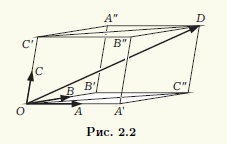
Остается заметить, что пары векторов OA ≠ 0 и OA" , OB ≠ 0 и OB" , OC ≠ 0 и OC" коллинеарны, и, следовательно, можно подобрать коэффициенты α, β, γ так, что OA" = αOA , OB" = βOB и OC" = γOC . Окончательно получаем OD = αOA + βOB + γOC . Следовательно, вектор OD выражается через остальные три вектора, а все четыре вектора, согласно теореме 2.1, линейно зависимы.
 Какие можно привести примеры слов с корнем ЛАГ - ЛОЖ; ГОР - ГАР?
Какие можно привести примеры слов с корнем ЛАГ - ЛОЖ; ГОР - ГАР? Галогены — Гипермаркет знаний
Галогены — Гипермаркет знаний Реформы Павла I Манифесты павла 1
Реформы Павла I Манифесты павла 1