Механическое движение Относительность движения, Система отсчета, Материальная точка, Траектория. Путь и перемещение. Мгновенная скорость. Ускорение. Равномерное и равноускоренное движение
План ответа
1. Определение механического движения. 2. Основные понятия механики. 3. Кинематические характеристики. 4. Основные уравнения. 5. Виды движения. 6. Относительность движения.
Механическим движением называют изменение положения тела (или его частей) относительно других тел. Например, человек, едущий на эскалаторе в метро, находится в покое относительно самого эскалатора и перемещается относительно стен туннеля; гора Эльбрус находится в покое относительно Земли и движется вместе с Землей относительно Солнца.
Из этих примеров видно, что всегда надо указать тело, относительно которого рассматривается движение, его называюттелом отсчета. Система координат, тело отсчета, с которым она связана, и выбранный способ измерения времени образуютсистему отсчета. Рассмотрим два примера. Размеры орбитальной станции, находящейся на орбите около Земли, можно не учитывать, рассчитывая траекторию движения космического корабля при стыковке со станцией, без учета ее размеров не обойтись. Таким образом, иногда размерами тела по сравнению с расстоянием до него можно пренебречь, в этих случаях тело считают материальной точкой, Линию, вдоль которой движется материальная точка, называют траекторией. Длина части траектории между начальным и конечным положением точки называют путем (L). Единица измерения пути - 1м.
Механическое движение характеризуется тремя физическими величинами: перемещением, скоростью и ускорением.
Направленный отрезок прямой, проведенный из начального положения движущейся точки в ее конечное положение, называетсяперемещением (s), Перемещение - величина векторная Единица измерения перемещения-1м.
Скорость - векторная физическая величина, характеризующая быстроту перемещения тела, численно равная отношению перемещения за малый промежуток времени к величине этого промежутка. Промежуток, времени считается достаточно малым, если скорость в течении этого промежутка не менялась. Например, при движении автомобиля t ~ 1 с, при движении элементарной частицы t ~ 10 с, при движении небесных тел t ~ 10 с. Определяющая формула скорости имеет вид v = s/t. Единица измерения скорости - м/с. На практике используют единицу измерения скорости км/ч (36 км/ч = 10 м/с). Измеряют скорость спидометром.
Ускорение - векторная физическая величина, характеризующая быстроту изменения скорости, численно равная отношению изменения скорости к промежутку времени, в течение которого это изменение произошло. Если скорость изменяется одинаково в течение всего времени движения, то ускорение можно рассчитать по формуле а = (v – v 0)/t. Единица измерения ускорения - м/с 2 .
Характеристики механического движения связаны между собой основными кинематическими уравнениями.
s = v 0 t + at 2 / 2;
v = v 0 + at.
Предположим, что тело движется без ускорения (самолет на маршруте), его скорость в течение продолжительного времени не меняется, а = 0, тогда кинематические уравнения будут иметь вид: v = const, s = vt .
Движение, при котором скорость тела не меняется, т. е. тело за любые равные промежутки времени перемещается на одну и ту же величину, называютравномерным прямолинейным движением.
Во время старта скорость ракеты быстро возрастает, т. е. ускорение а > О, а == const.
В этом случае кинематические уравнения выглядят так: v = v 0 + at, s = V 0 t + at 2 / 2.
При таком движении скорость и ускорение имеют одинаковые направления, причем скорость изменяется одинаково за любые равные промежутки времени. Этот вид движения называютравноускоренным.
При торможении автомобиля скорость уменьшается одинаково за любые равные промежутки времени, ускорение меньше нуля; так как скорость уменьшается, то уравнения принимают вид:v = v 0 + at, s = v 0 t - at 2 / 2 . Такое движение называют равнозамедленным.
Все физические величины, характеризующие движение тела (скорость, ускорение, перемещение), а также вид траектории, могут изменяться при переходе из одной системы к другой, т. е. характер движения зависит от выбора системы отсчета, в этом и проявляется относительность движения. Например, в воздухе происходит дозаправка самолета топливом. В системе отсчета, связанной с самолетом, другой самолет находится в покое, а в системе отсчета, связанной с Землей, оба самолета находятся в движении. При движении велосипедиста точка колеса в системе отсчета, связанной с осью, имеет траекторию, представленную на рисунке 1.
Рис. 1 Рис. 2
В системе отсчета, связанной с Землей, вид траектории оказывается другим (рис. 2).
Билет№3
Взаимодействие тел. Сила. Законы Ньютона
Закон. Существуют такие системы отсчета, называемые инерциальными, относительно которых поступательно движущиеся тела сохраняют свою скорость постоянной, если на них не действуют другие тела.
Закон. При взаимодействии тел возникают силы, равные по величине, противоположные по направлению, направленные вдоль одной прямой, одинаковые по природе и приложенные к разным телам.
План ответа
Взаимодействие тел. 2. Виды взаимодействия. 3. Сила. 4. Силы в механике.
| |

Простые наблюдения и опыты, например с тележками (рис. 3), приводят к следующим качественным заключениям: а) тело, на которое другие тела не действуют, сохраняет свою скорость неизменной;
б) ускорение тела возникает под действием других тел, но зависит и от самого тела; в) действия тел друг на друга всегда носят характер взаимодействия. Эти выводы подтверждаются при наблюдении явлений в природе, технике, космическом пространстве только в инерциальных системах отсчета.
Взаимодействия отличаются друг от друга и количественно, и качественно. Например, ясно, что чем больше деформируется пружина, тем больше взаимодействие ее витков. Или, чем ближе два одноименных заряда, тем сильнее они будут притягиваться. В простейших случаях взаимодействия количественной характеристикой является сила. Сила - причина ускорения тел по отношению к инерциальной системе отсчета или их деформации. Сила - это
векторная физическая величина, являющаяся мерой ускорения, приобретаемого телами при взаимодействии. Сила характеризуется: а) модулем; б) точкой приложения; в) направлением.
Единица измерения силы - ньютон. 1 ньютон - это сила, которая телу массой 1 кг сообщает ускорение 1 м/с в направлении действия этой силы, если другие тела на него не действуют. Равнодействующей нескольких сил называют силу, действие которой эквивалентно действию тех сил, которые она заменяет. Равнодействующая является векторной суммой всех сил, приложенных к телу.
R=F1+F2+...+Fn,.
Качественно по своим свойствам взаимодействия также различны. Например, электрическое и магнитное взаимодействия связаны с наличием зарядов у частиц либо с движением заряженных частиц. Наиболее просто рассчитать силы в электродинамике: сила Ампера - F = IlBsina, сила Лоренца - F=qv Bsin a., кулоновская сила - F = q 1 q 2 /r 2 ; и гравитационные силы: закон всемирного тяготения-F = Gm 1 m 2 /r 2 . Такие механические силы, как
сила упругости и сила трения, возникают в результате электромагнитного взаимодействия. Для их расчета необходимо использовать формулы: .Fynp = -kx (закон Гука), Fтр = MN - сила трения.
На основании опытных данных были сформулированы законы Ньютона. Второй закон Ньютона. Ускорение, с которым движется тело, прямо пропорционально равнодействующей всех сил, действующих на тело, обратно пропорционально его массе и направлено так же, как и равнодействующая сила: а = F/m.
Для решения задач закон часто записывают в виде: F = та.
Билет4
Импульс тела. Закон сохранения импульса в природе и технике
План ответа
1. Импульс тела. 2. Закон сохранения импульса. 3. Применение закона сохранения импульса. 4. Реактивное движение.
Простые наблюдения и опыты доказывают, что покой и движение относительны, скорость тела зависит от выбора системы отсчета; по второму закону Ньютона, независимо от того, находилось ли тело в покое или двигалось, изменение скорости его движения может происходить только при действии силы, т. е. в результате взаимодействия с другими телами. Однако существуют величины, которые могут сохраняться при взаимодействии тел. Такими величинами являются энергия и импульс.
Импульсом тела называют векторную физическую величину, являющуюся количественной характеристикой поступательного движения тел. Импульс обозначается р. Единица измерения импульса Р - кг м/с. Импульс тела равен произведению массы тела на его скорость: р = mv. Направление вектора импульса р совпадает с направлением вектора скорости тела v (рис. 4).

|

Для импульса тел выполняется закон сохранения, который справедлив только для замкнутых физических систем. В общем случае замкнутой называют систему, которая не обменивается энергией и массой с телами и полями, не входящими в нее. В механикезамкнутой называют систему, на которую не действуют внешние силы или действие этих сил скомпенсировано. В этом случае р 1 = р 2 где р 1 - начальный импульс системы, а р 2 - конечный. В случае двух тел, входящих в систему, это выражение имеет вид m 1 v 1 + т 2 v 2 = m 1 v 1 " + т 2 v 2 " где т 1 и т 2 - массы тел, а v 1 и v 2 , - скорости до взаимодействия, v 1 " иv 2 " - скорости после взаимодействия. Эта формула и является математическим выражением закона сохранения импульса:импульс замкнутой физической системы сохраняется при любых взаимодействиях, происходящих внутри этой системы.
Другими словами: в замкнутой физической системе геометрическая сумма импульсов тел до взаимодействия равна геометрической сумме импульсов этих тел после взаимодействия. В случае незамкнутой системы импульс тел системы не сохраняется. Однако, если в системе существует направление, по которому внешние силы не действуют или их действие скомпенсировано, то сохраняется проекция импульса на это направление. Кроме того, если время взаимодействия мало (выстрел, взрыв, удар), то за это время даже в случае незамкнутой системы внешние силы незначительно изменяют импульсы взаимодействующих тел. Поэтому для практических расчетов в этом случае тоже можно применять закон сохранения импульса.
Экспериментальные исследования взаимодействий различных тел - от планет и звезд до атомов и элементарных частиц - показали, что в любой системе взаимодействующих тел при отсутствии действия со стороны других тел, не входящих в систему или равенстве нулю суммы действующих сил, геометрическая сумма импульсов тел действительно остается неизменной.
В механике закон сохранения импульса и законы Ньютона связаны между собой. Если на тело массой т в течение времени t действует сила и скорость его движения изменяется от v 0 до v, то ускорение движения a тела равно a = (v - v 0)/t. На основании второго закона Ньютона для силы F можно записать F = та = m(v - v 0)/t, отсюда следует Ft = mv - mv 0 .
Ft - векторная физическая величина, характеризующая действие на тело силы за некоторый промежуток времени и равная произведению силы на время t ее действия, называетсяимпульсом силы.
Единица импульсав СИ - Н с.
Закон сохранения импульса лежит в основе реактивного движения.Реактивное движение - это такое движение тела, которое возникает после отделения от тела его части.
Пусть тело массой т покоилось. От тела отделилась какая-то его часть т 1 со скоростью v 1 . Тогда
оставшаяся часть придет в движение в противоположную сторону со скоростью v 2 , масса оставшейся части т 2 Действительно, сумма импульсов обоих частей тела до отделения была равна нулю и после разделения будет равна нулю:
т 1 v 1 +m 2 v 2 = 0, отсюда v 1 = -m 2 v 2 /m 1 .
Большая заслуга в развитии теории реактивного движения принадлежит К. Э. Циолковскому.
Он разработал теорию полета тела переменной массы (ракеты) в однородном поле тяготения и рассчитал запасы топлива, необходимые для преодоления силы земного притяжения; основы теории жидкостного реактивного двигателя, а так же элементы его конструкции; теорию многоступенчатых ракет, причем предложил два варианта: параллельный (несколько реактивных двигателей работают одновременно) и последовательный (реактивные двигатели работают друг за другом). К. Э. Циолковский строго научно доказал возможность полета в космос с помощью ракет с жидкостным реактивным двигателем, предложил специальные траектории посадки космических аппаратов на Землю, выдвинул идею создания межпланетных орбитальных станций и подробно рассмотрел условия жизни и жизнеобеспечения на них. Технические идеи Циолковского находят применение при создании современной ракетно-космической техники. Движение с помощью реактивной струи, по закону сохранения импульса, лежит в основе гидрореактивного двигателя. В основе движения многих морских моллюсков (осьминогов, медуз, кальмаров, каракатиц) также лежит реактивный принцип.
В классической механике считается, что:
а) Масса материальной точки не зависит от состояния движения точки, являясь ее неизменной характеристикой.
б) Масса – величина аддитивная, т.е. масса системы (например, тела) равна сумме масс вех материальных точек, входящих в состав этой системы.
в) Масса замкнутой системы остается неизменной при любых процессах, происходящих в этой системе (закон сохранения массы).
Плотностью ρ тела в данной его точке M называется отношение массы dm малого элемента тела, включающего точку M , к величине dV объема этого элемента:
Размеры рассматриваемого элемента должны быть столь малы, чтобы изменением плотности в его пределах можно было во много раз больше межмолекулярных расстояний.
Тело называется однородным , если во всех его точках плотность одинакова. Масса однородного тела равна произведению его плотности на объем:
Масса неоднородного тела:
dV,где ρ – функция координат, а интегрирование проводится по всему объему тела. Средней плотностью (ρ) неоднородного тела называется отношение его массы к объему: (ρ)=m/V.
Центром масс системы материальных точек называется точка С, радиус-вектор
которой равен: и – масса и радиус-вектор i -й материальной точки, n – общее число материальных точек в системе, а m= - масса всей системы.Скорость центра масс:
Векторная величина
, равная произведению массы материальной точки на ее скорость , называется импульсом, или количеством движения , этой материальной точки. Импульсом системы материальных точек называется вектор p , равный геометрической сумме импульсов всех материальных точек системы:импульс системы равен произведению массы всей системы на скорость центра ее масс:
Второй закон Ньютона
Основным законом динамики материальной точки является второй закон Ньютона, который говорит о том, как изменяется механическое движение материальной точки под действием приложенных к ней сил. Второй закон Ньютона гласит: скорость изменения импульса ρ материальной точки равна действующей на нее силе F , т.е.
, илигде m и v – масса и скорость материальной точки.
Если на материальную точку одновременно действуют несколько сил, то под силой F во втором законе Ньютона нужно понимать геометрическую сумму всех действующих сил – как активных, так и реакций связей, т.е. равнодействующую силу.
Векторная величина F dt называется элементарном импульсом силы F за малое время dt ее действия. Импульс силы F за конечный промежуток времени от
до равен определенному интегралу:где F , в общем случае, зависит от времени t .
Согласно второму закону Ньютона изменение импульса материальной точки равно импульсу действующей на нее силы:
d p= Fdt и
, – значение импульса материальной точки в конце ( ) и в начале ( ) рассматриваемого промежутка времени.Поскольку в ньютоновской механике масса m материальной точки не зависит от состояния движения точки, то
Поэтому математическое выражение второго закона Ньютона можно также представить в форме
– ускорение материальной точки, r – ее радиус-вектор. Соответственно формулировка второго закона Ньютона гласит: ускорение материальной точки совпадает по направлению с действующей на нее силой и равно отношению этой силы к массе материальной точки.Касательное и нормальное ускорение материальной определяются соответствующими составляющими силы F
, – модуль вектора скорости материальной точки, а R – радиус кривизны ее траектории. Сила , сообщающая материальной точке нормальное ускорение, направлена к центру кривизны траектории точки и потому называется центростремительной силой.Если на материальную точку одновременно действуют несколько сил
, то ее ускорение . Следовательно, каждая из сил, одновременно действующих на материальную точку, сообщает ей такое же ускорение, как если бы других сил не было (принцип независимости действия сил).Дифференциальным уравнением движения материальной точки называется уравнение
В проекциях на оси прямоугольной декартовой системы координат это уравнение имеет вид
, ,где x, y и z – координаты движущейся точки.
Третий закон Ньютона . Движение центра масс
Механическое действие тел друг на друга проявляется в виде их взаимодействия. Об этом говорит третий закон Ньютона: две материальные точки действуют друг на друга с силами, которые численно равны и направлены в противоположные стороны вдоль прямой, соединяющей эти точки.
– сила, действующая на i - ю материальную точку со стороны k - й, а – сила действующая на k-ю материальную точку со стороны i-й, то, согласно третьему закону Ньютона, приложены к разным материальным точкам и могут и взаимно уравновешиваться только в тех случаях, когда эти точки принадлежат одному и тому же абсолютно твердому телу.Третий закон Ньютона является существенным дополнением к первому и второму законам. Он позволяет перейти от динамики отдельной материальной точки к динамике произвольной механической системы (системы материальных точек). Из третьего закона Ньютона следует, что в любой механической системе геометрическая сумма всех внутренних сил равна нулю: где
– результирующая внешних сил, приложенных к i -й материальной точке.Из второго и третьего законов Ньютона следует, что первая производная по времени t от импульса p механической системы равна главному вектору всех внешних сил, приложенных к системе,
.Это уравнение выражает закон изменения импульса системы.
В чем причина движения тел? Ответ на этот вопрос дает раздел механики, называемый динамикой.
Как можно изменить скорость тела, заставить его двигаться быстрее или медленнее? Только при взаимодействии с другими телами. При взаимодействии тела могут поменять не только скорость, но и направление движения и деформироваться, изменив при этом форму и объем. В динамике для количественной меры взаимодействия тел друг на друга введена величина названная силой. А изменение скорости за время действия силы характеризуется ускорением. Сила есть причина ускорения.
Понятие силы
Сила – это векторная физическая величина, характеризующая действие одного тела на другое, проявляющееся в деформации тела или изменении его движения относительно других тел.
Сила обозначается буквой F. За единицу измерения в системе СИ принят Ньютон (Н), который равен силе, под действием которой тело массой в один килограмм получает ускорение в один метр на секунду в квадрате. Сила F полностью определена, если заданы ее модуль, направление в пространстве и точка приложения.
Для измерения сил служит специальный прибор называемый динамометром.
Сколько же сил в природе?
Силы можно разделить на два типа:
- Действуют при непосредственном взаимодействии, контактные (упругие силы, силы трения);
- Действуют на расстоянии, дальнодействующие (сила притяжения, сила тяжести, магнитные, электрические).
При непосредственном взаимодействии, например выстрел из игрушечного пистолета, тела испытывают изменение формы и объема по сравнению с первоначальным состоянием, то есть деформацию сжатия, растяжения, изгиба. Сжата пружина пистолета перед выстрелом, деформируется пулька при ударе о пружину. В данном случае силы действуют в момент деформации и исчезают вместе с ней. Силы такие называют упругими. Силы трения возникают при непосредственном взаимодействии тел, когда они катятся, скользят друг относительно друга.
Примером сил, действующих на расстоянии, может служить камень, брошенный вверх, вследствие притяжения он упадет на Землю, приливы и отливы, возникающие на океанских побережьях. С увеличением расстояния такие силы убывают.
В зависимости от физической природы взаимодействия силы можно разделить на четыре группы:
- слабые;
- сильные;
- гравитационные;
- электромагнитные.
Со всеми типами этих сил мы встречаемся в природе.
Гравитационные или силы всемирного тяготения являются самыми универсальными, все, что имеет массу способно испытывать эти взаимодействия. Они вездесущи и всепроникающие, но очень слабы, поэтому мы их не замечаем, особенно на огромных расстояниях. Гравитационные силы дальнодействующие, связывают все тела во Вселенной.
Электромагнитные взаимодействия возникают между заряженными телами или частицами, посредством действия электромагнитного поля. Электромагнитные силы позволяют нам видеть предметы, так как свет это одна из форм электромагнитных взаимодействий.
Слабые и сильные взаимодействия стали известны благодаря изучению строения атома и атомного ядра. Сильные взаимодействия возникают между частицами в ядрах. Слабые характеризуют взаимные превращения друг в друга элементарных частиц, действуют при реакциях термоядерного синтеза и радиоактивных распадах ядер.
Если на тело действует несколько сил?
При действии нескольких сил на тело одновременно заменяют это действие одной силой, равной их геометрической сумме. Полученную в этом случае силу называют равнодействующей. Она сообщает телу то же ускорение, что и одновременно действующие на тело силы. Это так называемый принцип суперпозиции сил.
Из наблюдений можно заметить, что тела изменяют свою скорость только при наличии не скомпенсированного действия. Т. к. быстрота изменения скорости характеризуется ускорением тела, можем заключить, что причиной ускорения является некомпенсированное действие одного тела на другое. Но одно тело не может действовать на другое, не испытывая его действия на себе. Следовательно, ускорение появляется при взаимодействии тел. Ускорение приобретают оба взаимодействующие тела. Так же из наблюдений можно установить ещё один факт: при одинаковом действии разные тела приобретают разные ускорения.
Инертность - это свойство тела сохранять свою скорость постоянной (то же, что и инерция). Проявляет себя в том, что для изменения скорости тела требуется некоторое время. Процесс изменения скорости не может быть мгновенным.
Например, движущийся по дороге автомобиль не может мгновенно остановиться, для уменьшения скорости требуется некоторое время, а за это время он успевает переместиться на довольно большое расстояние (десятки метров). (Осторожно переходите дорогу!!!)
Мерой инертности является инертная масса.
Масса (инертная) - мера инертности тела.
Чем инертнее тело, тем больше его масса. Чем больше инертность, тем меньше ускорение. Следовательно, чем больше масса тела, тем меньше его ускорение: a ∼ 1 m \boxed{a\sim\frac 1m} .
Данная зависимость записана единственно правильным способом, т. к. форма m ∼ 1 a m \sim \frac 1a не верна. Масса не может зависеть от ускорения, она является свойством тела, а ускорение является характеристикой состояния движения тела.
Данная зависимость подтверждается многочисленными опытными результатами.
Рис. 2 Измерение массы методом взаимодействия тел.
Два тела, скреплённые между собой сжатой пружиной, после пережигания нити, удерживающей пружину, начинают двигаться не которое время с ускорением (рис. 1) . Опыт показывает, что при любых взаимодействиях данных двух тел отношение ускорений тел равно обратному отношению их масс:
\[\frac{a_1}{a_2} = \frac{m_2}{m_1};\]
если взять первую массу за эталонную (m 1 = m эт m_1 = m_\mathrm{эт}), то m 2 = m эт a эт a 2 m_2 = m_\mathrm{эт}\frac{a_\mathrm{эт}}{a_2} .
Масса, измеренная путём взаимодействия (измерения ускорения), называется инертной .
Измерение массы методом взвешивания тел.
Второй способ измерения масс основан на сравнении действия Земли на различные тела. Такое сравнение можно осуществить либо последовательно (сначала определяют растяжение пружины под действием эталонных масс, а потом под действием исследуемого тела в тех же условиях ), либо одновременно располагают на равноплечих рычажных весах на одной чаше исследуемое тело, а на другой эталонные массы (рис. 2).

Рис. 2

|
| Рис. 3 |
Масса, измеренная путём взвешивания, называется гравитационной.
В качестве эталона и той и другой массы принята масса тела, выполненного в форме цилиндра высотой 39 мм 39\ \mathrm{мм} и диаметром 39 мм 39\ \mathrm{мм} , изготовленного из сплава 10 % иридия и 90 % платины (рис. 3).
В 1971 г наши соотечественники Брагинский и Панов придумали и провели опыт по сравнению массы гравитационной и инертной. Оказалось, что с точностью до 10 - 12 10^{-12} % эти массы равны.
Данный факт известен был и ранее, и послужил основанием для формулировки Эйнштейном принципа эквивалентности.
Принцип эквивалентности утверждает, что
1) ускорение, вызванное гравитационным взаимодействием в малой области пространства , и за небольшой интервал времени, неотличимо от ускоренно движущейся системы отсчёта .
2) ускоренно движущееся тело эквивалентно неподвижному телу, находящемуся в гравитационном поле.
Пример 1.
Два тела массами 400 г 400\ \mathrm{г} и 600 г 600\ \mathrm{г} двигались навстречу друг другу и после удара остановились. Какова скорость второго тела, если первое двигалось со скоростью 3 м / с 3\ \mathrm{м}/\mathrm{с} ?
 Решение показательных неравенств
Решение показательных неравенств Формулы сокращенного умножения
Формулы сокращенного умножения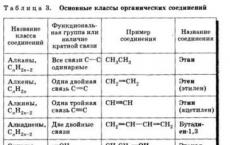 Химия - комплексная подготовка к внешнему независимому оцениванию
Химия - комплексная подготовка к внешнему независимому оцениванию